5.6.2. Системы управления и самоуправления
5.6.2. Системы управления и самоуправления
В традиционной теории управления деление схем и систем управления на «самоуправляемые» и «управляемые» достаточно условно и может быть представлено универсумом класса 2U. В таком «черно-белом» универсуме трудно учесть реальные оттенки жизненного цикла систем. Для повышения точности описаний типологию само/управления целесообразно расширить, как минимум, до универсума класса 4U, поставив его в соответствие с универсумной стратификацией, для чего приведём некоторые обоснования.
Если необходимо, чтобы некий объект ОУ управлялся, то необходим некий субъект СУ, который выделит из окружающего мира ОУ, организует ПС и ОС, после чего и сможет им управлять. то есть, для управления ОУ нужна суперсистема, которая организует процесс управления. При этом ОУ не обязательно должен быть суперсистемой, а может выступать в качестве армейской «материальной части» интегранта.
При организации процесса самоуправления речь идёт об организации в суперсистеме достаточно сложных структур, элементы которых способны к обмену U-потоками, и как СУ и ОУ могут в процессе обмена (диалога, триалога, полилога) меняться местами. При этом деление части элементов суперсистемы на СУ и ОУ возможно только на каком-то ограниченном временном отрезке. В другой момент времени U-потоки между элементами и, следовательно, их подчиненность друг другу, могут иметь уже другую направленность. Конечно же, любые структуры, которые мы относим к классу самоуправляемых (точнее их следовало бы именовать самоорганизующимися) не фантастически безразмерны в своих возможностях. На самом деле они всегда ограничены рамками ИВОУ.
Осуществление процесса самоуправления возможно только в суперсистеме, созданной на основе виртуальных структур, обладающих интеллектом. Подчинённая интеллектуальной схема предикции осуществляет уже не столько процесс самоуправления, сколько процесс слабого маневрирования, саморегулирования, поскольку целевую функцию работы для неё первоначально задаёт именно интеллектуальный уровень универсума.
К классу «чисто управляемых», лишённых возможности самоорганизации и самоуправления систем можно отнести адаптивные и программные схемы управления. Они управляются той алгоритмикой, которая заложена в них интеллектом и/или системой предикции. Программную схему управления без каких-то натяжек можно назвать просто системой исполнения команд или исполнительной системой.
Важно, что предикционная, адаптивная и программная схемы могут быть построены как на интеграционной элементной базе (т. е. состоять из элементов, отличных от элементов управляющей ими суперсистемы), так и быть организованными из тех же элементов, из которых состоит весь универсум суперсистемы. то есть суперсистема может моделировать и выполнить функции любой системы. При этом самоуправляющейся системе соответствует алгоритмика работы виртуальных структур, саморегулирующиеся структуры можно именовать динамическими или предикционными, управляющиеся (точнее – управляемые) системы представляют структуры статические, исполняющие системы – фиксированный тип структур. Уточнение терминов «самоуправление» и «управление» до соответствующего типологии схем управления класса 4U даёт эту вполне обоснованную иерархию (рис. 5.15).
Класс самоуправляющихся систем представляет интеллектуальная схема управления, которая совместно с предикционной является ничем иным, как безструктурным способом управления. Следует уточнить, что самоуправление в закрытой системе – это не что иное, как процесс реализации отложенного по времени внешнего управления, определённого рамками матрицы допустимых возможностей. Так, например, срок автономного плавания самоуправляющейся системы «подводная лодка» определён возможностями её виртуальных структур (компетентностью командования), запасами ресурсов на борту и многими другими факторами как матрицей возможных состояний. Другими словами: самоуправление начинается там, где на основании экстраполяционных расчётов возникает возможность прогнозирования будущего.
В класс управляемых структурным способом систем входит адаптивная и программная схемы управления. то есть, процесс управления осуществляется там, где не возникает потребности в экстраполяционном расчёте и/или прогнозировании будущего[146].
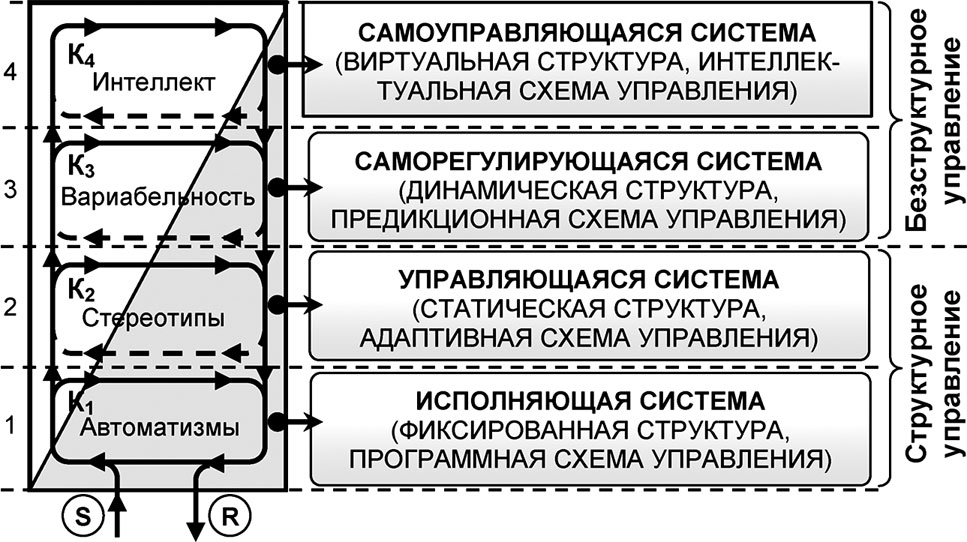
Рис. 5.15. Соответствие различных типов систем, структур и схем
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
5.6.1. Замкнутые и открытые системы управления
5.6.1. Замкнутые и открытые системы управления В отношении некоторых системных определений, порождённых системой MEST, между различными научными сообществами существуют определённые разногласия[143]. Одним из «подводных камней» в понимании специалистами разных профилей
5.6.3. Вложенные системы управления
5.6.3. Вложенные системы управления В реальном мире различные системы управления самым тесным образом взаимодействуют и зачастую оказывают друг на друга значительное влияние, которое невозможно не учитывать.Примерами вложенных подсистем в теле живых существ являются
5.6.4. Иерархические системы управления
5.6.4. Иерархические системы управления Понятие иерархических систем при универсумном подходе является вариантом описания вложенных систем, в которых внимание акцентируется не столько на межэлементных связях, сколько на уровнях и конструктах, определяющих алгоритмику
5.6.6. Точечные системы управления
5.6.6. Точечные системы управления Название «точечная система управления» используется достаточно редко. Она характеризует малый фрагмент (конструкт, модуль, фрейм, несколько взаимодействующих элементов) суперсистемы, который может рассматриваться как отдельный
8.1. Элементы системы управления маркетингом[40]
8.1. Элементы системы управления маркетингом[40] Управление маркетингом – это целенаправленная координация маркетинговой деятельности образовательного учреждения исходя из требований рынка с целью предоставления качественных услуг целевым потребителям
Глава 3 Борьба с недостатками как важная сторона самоуправления
Глава 3 Борьба с недостатками как важная сторона самоуправления В этой главе нашей книги мы расскажем о том, как бороться с недостатками, мешающими в построении карьеры и продвижении по должностной лестнице. Мы не собираемся напутствовать читателя, раскрывая сущность
Создание системы управления эффективностью
Создание системы управления эффективностью Система управления эффективностью включает в себя три основных элемента:? ежегодные аттестационные беседы;? ежемесячные индивидуальные встречи;? внеплановые встречи по требованию менеджера или подчиненного.Вдохновляющие
6.5.4. Системы управления резюме
6.5.4. Системы управления резюме Множеством объединений, групп и компаний было разработано несколько электронных баз данных резюме. Они сильно отличаются по размеру, содержанию, доступности и стоимости, но все они позволяют проводить тем или иным образом компьютерный
Эволюция системы управления компании
Эволюция системы управления компании Шкала эволюции системы управления компании разработана мной на основании теории В. Тарасова[9] об уровнях управленческого искусства руководителя. Это вторая шкала Business 3D.О чем идет речь? В процессе развития компании ее система
Системы управления резюме
Системы управления резюме Множеством объединений, групп и компаний было разработано несколько электронных баз резюме. Они сильно различаются по размеру, содержанию, доступности и стоимости, но все позволяют тем или иным образом осуществлять компьютерный поиск. Системы
12. Цели системы управления персоналом, этапы организационного проектирования системы управления персоналом
12. Цели системы управления персоналом, этапы организационного проектирования системы управления персоналом Субъектами управления персоналом выступают лица и подразделения аппарата управления организации, осуществляющие функции управления работниками. Ими являются
Системы управления знаниями
Системы управления знаниями Системы управления знаниями комбинируются из технологий хранения и анализа данных, моделирования и коммуникаций для облегчения процесса управления знаниями. Основная цель большинства систем такого рода — организовать знания таким