6.1. Векторы управления
6.1. Векторы управления
Горизонтальное разбиение страт на фреймы – не единственно возможный вариант универсумной дискретизации. Определённый интерес представляет и «вертикальное» представление наборов фреймов как «сборки» элементов векторов управления. Так, например, для универсума СУФУ-3 (Рис. 6.1а) можно этапы описания 1 «Распознавание и анализ фактора среды» и 3 «Реализация принятых решений» представить в виде двух векторов – вектора анализа текущего состояния и вектора синтеза процессов управления (Рис. 6.1б), содержащих по три-четыре элемента.
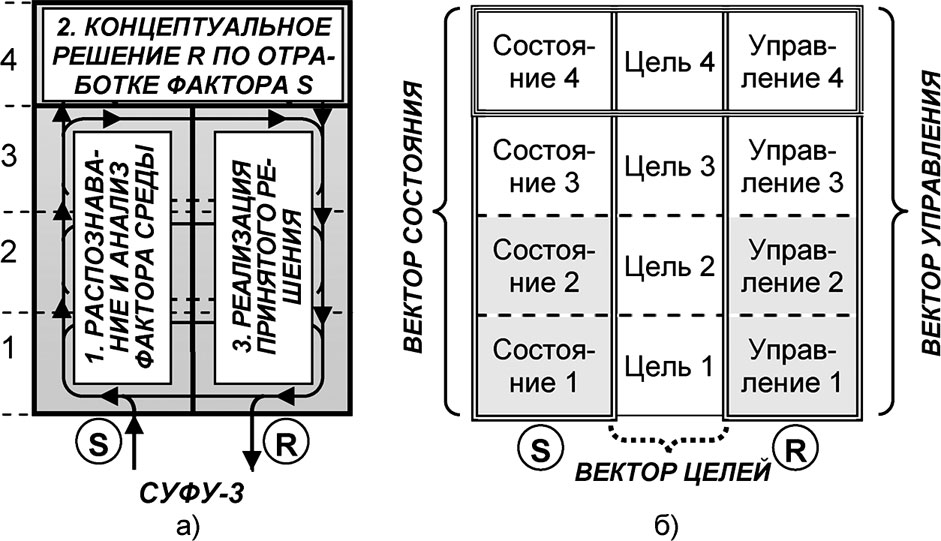
Рис. 6.1. Векторы управления
Элементы векторов «Состояние 4» и «Управление 4» соответствуют этапу 2 СУФУ-3 «Концептуальное решение R по отработке фактора S».
Конечно же, выработка концептуального решения подразумевает наличие элемента «Цель 4» вектора целей, являющегося необходимым атрибутом любого универсума. В сжатом описании СУФУ просто не акцентируется внимание ни на количестве стратификационных элементов векторов, ни на обязательно присутствующем по умолчанию в любом универсуме векторе целей. Все цели нижних иерархических уровней можно именовать «задачами» и «подзадачами», поскольку они вытекают из главной цели – основной целевой функции, размещённой в высшей универсумной страте.
Процесс управления в векторном описании можно представить также в виде универсума класса 4U3, содержащего поле из 12-ти фреймов, конструктов – элементов векторов (Рис. 6.2а), соответствующих трём наборам ранжированной информации – векторам состояния, цели и собственно управления (Рис. 6.2б).
Вектор состояния описывает реальное поведение объекта как соответствующие стратификационным уровням значения элементов универсумного каскада S.
Вектор целей управления (целеполагания, самоуправления) представляет описание желаемого (планируемого, идеального) поведения объекта, соответствующего универсумному каскаду интеллектуальной обработки информации I.
Вектор управления (ошибки управления) описывает величину отклонения реального процесса (состояния универсумного каскада R) от предписанного вектором целей поведения, т. е. величину требуемых управляющих воздействий, необходимых для приведения в соответствие элементов вектора состояния элементам вектора целей. В различных изложениях теории название «векторы управления» часто используется для общего обозначения всех трёх векторов, поэтому следует обращать внимание именно на функциональное назначение конкретных конструктов.

Рис. 6.2. Определение концепции (целевой функции) управления
Минимизация величин вектора ошибки управления, определяемой разностью целей и текущего состояния системы «У=Ц-С» или «R=S-I» и определяет концепцию управления. Можно сказать, что вектор управления (ответ на вопрос «что надо делать») определяется как разница между вектором целей («хочу достичь того-то») и вектором состояния («что есть на самом деле»). Значение всех элементов вектора управления (ошибки) равное нулю означает, что требуемая цель достигнута в полной мере.
Размерность векторов управления – вектора состояний, вектора целей и вектора ошибки одинакова. Важно подчеркнуть, что наибольшее влияние на процесс управления оказывают высокоприоритетные (т. е. преимущественно информационные) элементы векторов. Согласно общепринятым и также универсумным критериям самая важная цель должна находиться в верхней позиции элементов вектора, а наименее приоритетная на последнем. Универсумная логика уточняет этот критерий: верхние строки векторов управления должны занимать максимально информационные задачи, нижние – максимально материальные.
Другими словами, достижение информационных целей (задач) является более приоритетным процессом, чем достижение материальных задач (целей). Чем выше соответствующий универсумной страте уровень задачи, включённой в вектор управления, тем ближе она к решению стратегических вопросов управления процессом, и наоборот, чем ниже уровень задачи, тем более точно её можно определить как задачу тактического или оперативного характера.
Если критерием качества выбран элемент высшего информационного приоритета, то управление можно назвать оптимальным, поскольку определяющее значение для качества управления имеют информационные уровни управления.
Ранжирование векторов управления в соответствии с универсумной логикой позволяет снизить влияние случайных и субъективных факторов на оценку качества управления: чем точнее выстроена иерархия векторов по мере изменения соотношения «Материя-Информация», тем с более высокой степенью прогностики будет определён критерий качества управления. Этот факт соответствия иерархии элементов векторов с U-логикой отражен в следующем U-законе:
10: Закон РАНЖИРОВАНИЯ: Векторы систем управления ранжируются по Мере изменения соотношения между их Материальной и Информационной составляющей.
Следует подчеркнуть, что в данном законе речь ведётся о достижении уровня максимально глубокой прогностики, которую способна осуществить универсумная структура. В случае преднамеренного ограничения горизонта прогностики иерархия элементов в векторах может измениться. Верно и обратное: нарушение U-закона Ранжирования векторов ограничивает горизонт прогностики.
U-закон Ранжирования векторов полностью соответствует этапам ПФУ. Так, распознавание факторов среды, воздействующих на систему (этап 1 ПФУ или конструкт 1 «оценка оперативного состояния»), приводит к пониманию складывающихся стереотипных ситуаций (конструкт 2 «оценка тактического состояния»), из которого, в свою очередь, формируется представление об обстановке (конструкт 3 «оценка стратегического состояния») и понимание общего состояния системы. Все эти конструкты в совокупности с конструктом 4 представляют Вектор состояния, описывающий этапы U-потока или анализа взаимодействия универсума с внешней средой.
Очевидно, что элементы (конструкты 12, 11, 10 и 5), входящие в Вектор целеполагания, также выстроенные в соответствии с U-законом ранжирования, представляют обычный универсумный I-каскад, вырабатывающий наиболее приоритетную, общую цель управления.
Содержанием Вектора управления (конструкты 6, 7, 8 и 9) является концепция решения проблемы (6), порождающая долгосрочную, прогнозного характера стратегию (7), затем среднесрочную тактику воплощения этих задач (8), которые, в свою очередь, приводят в выработке комплексов оперативных решений (9).
Очевидно, что оценка качества управления также должна производиться в соответствии с порядком ранжирования векторов управления – высший приоритет в определении качества должны иметь максимально информационно насыщенные элементы векторов. Вслед за ними размещаются элементы менее важных подцелей и задач вплоть до «самых нижних», материального характера составляющих, от которых при необходимости можно отказаться в первую очередь.
Изменение оценок качества управления должно подчиняться определённым зависимостям. Так, если значение параметра вектора высшего приоритета улучшилось, а большинство всех остальных значений (2-го, 3-го нижних уровней и т. д.) ухудшились, то в целом можно считать, что оценка качества управления улучшилось. Повышение качества управления на более высоком приоритете неизбежно окажет отсроченное влияние на улучшение качества управления во всех нижележащих векторах – управленческих стратах. А если наоборот, все значения нижних элементов векторов управления улучшились, но значение параметра высшего приоритета ухудшилось, то говорить о повышении качества управления не приходится, поскольку рано или поздно в данной иерархии неизбежна ошибка управления высшей страты, которая приведёт к общему снижению качества управления на всех нижележащих уровнях управления.
Конечно же, при всех манипуляциях с векторами следует учитывать объективные ограничения на значения векторов. Они не могут выходить за допустимые пределы, обычно принимающие какое-то максимальное и/или минимальное значение[165].
Для практических расчётов в качестве векторов целей и состояний удобно использовать нормированные процентные значения, т. е. такие, сумма которых составляет 100 процентов. При этом сумма значений всех элементов вектора управления будет равна нулю, а эта же сумма по модулю[166] будет являться удобным интегральным показателем степени отклонения системы от целевых параметров (рис. 6.3).
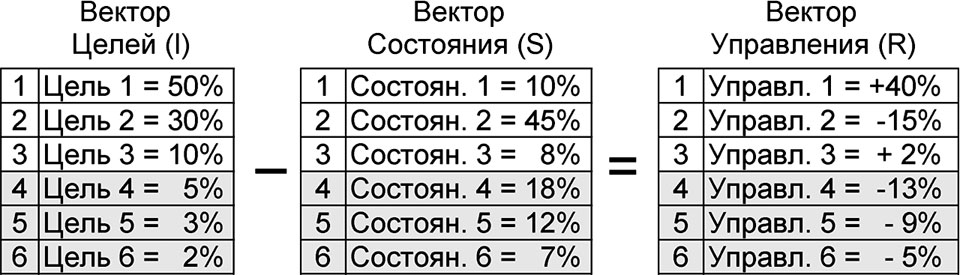
Рис. 6.3. Расчёт значений элементов вектора управления
Так, например, первая по приоритетности вектора целей задача прорыва вражеской обороны для командующего фронтом является концептуальной (цель 1) и определяет следующие по приоритетности задачи закрепления на оборонительном рубеже (цель 2), налаживание снабжения армии (цель 3) и другие задачи (цели 4,5,6).
Конечно же, реальные процессы управления должны учитывать различные ошибки, влияние непредусмотренных ранее воздействий, оказываемые внешней средой и корректироваться (для командующего в первую очередь необходимо учитывать возможные действия противника). В этой связи можно говорить не об одном векторе ошибок управления, а об их совокупности или матрице, как допустимом множестве векторов, описывающих некоторую область возможных вариантов осуществления процесса управления.
При работе системы в балансировочных режимах порядок их определения будет одним, при манёврах – другим. При работе в балансировочных режимах (программном или адаптивном класса 4U) следствием влияния различных факторов на систему будет то, что реальный процесс управления не пойдёт как идеальная прямая, а будет в той или иной мере колебаться вокруг неё. При этом все векторы системы управления в заданных границах могут изменять свои числовые значения.
Пересмотра порядка ранжирования и изменения значений элементов вектора целей при работе системы в балансировочном режиме не происходит. Производится только «перепроцентовка» числовых значений вектора состояний (рис. 6.4а), вызывающая затем соответствующий пересчёт значений вектора управления, возвращающего систему на заданную целевой функцией траекторию (рис. 6.4б).
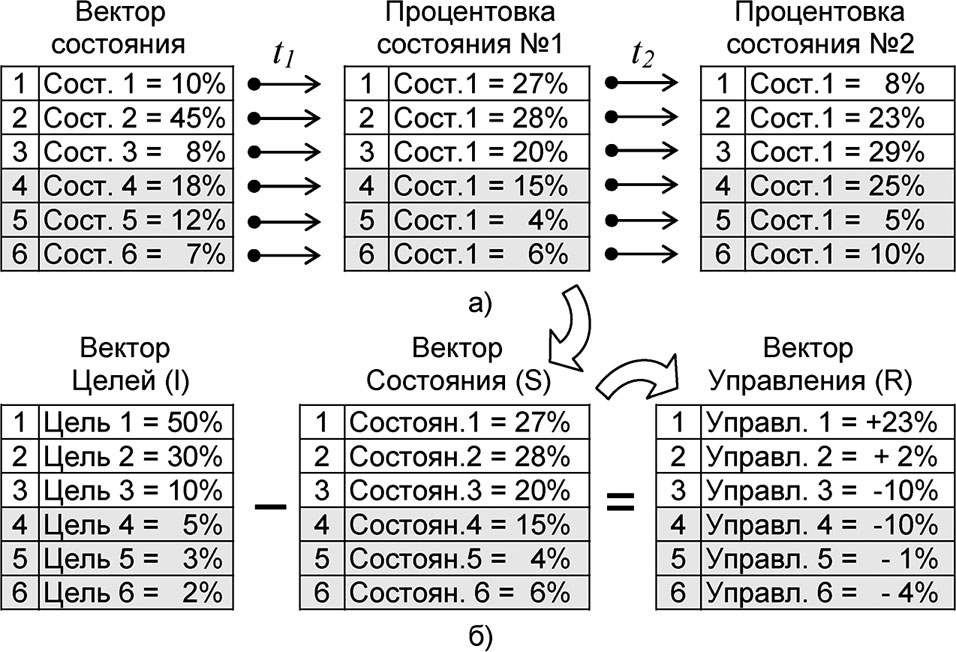
Рис. 6.4. Значения элементов векторов управления в балансировочном режиме
В момент времени t1 вектор состояния может быть описан «процентовкой состояния № 1», в следующий момент времени t2 «процентовкой № 2» и т. д., в соответствии с которым и будет осуществляться возврат системы на заданную траекторию изменения параметров.
При работе системы в маневровом режиме ситуация меняется.
Режим «слабого манёвра», рассчитанный на отработку ситуаций, выходящих за рамки балансировочной алгоритмике работы, соответствует пересмотру иерархии целевых функций (рис. 6.5а). Величина этого манёвра определяется уровнем иерархии реорганизуемых элементов вектора целей. Наибольшее влияние на поведение системы оказывает «переранжирование» верхних, информационных страт (например, перенесение цели третьего уровня на второй, а цели второго уровня на пятый).
В процессе проведения слабых манёвров, т. е. вариабельного подбора необходимой реакции системы R на внешнее воздействие S вектор целей в момент времени t1 может быть описан как «переранжирование этап № 1», в момент времени t2 как «переранжирование этап № 2» и т. д. В соответствии с новым вариантом ранжирования будет осуществляться переход в новую, расширенную матрицу возможных состояний. В случае подбора успешно работающего ранжирования система может возвратиться в балансировочный режим работы.
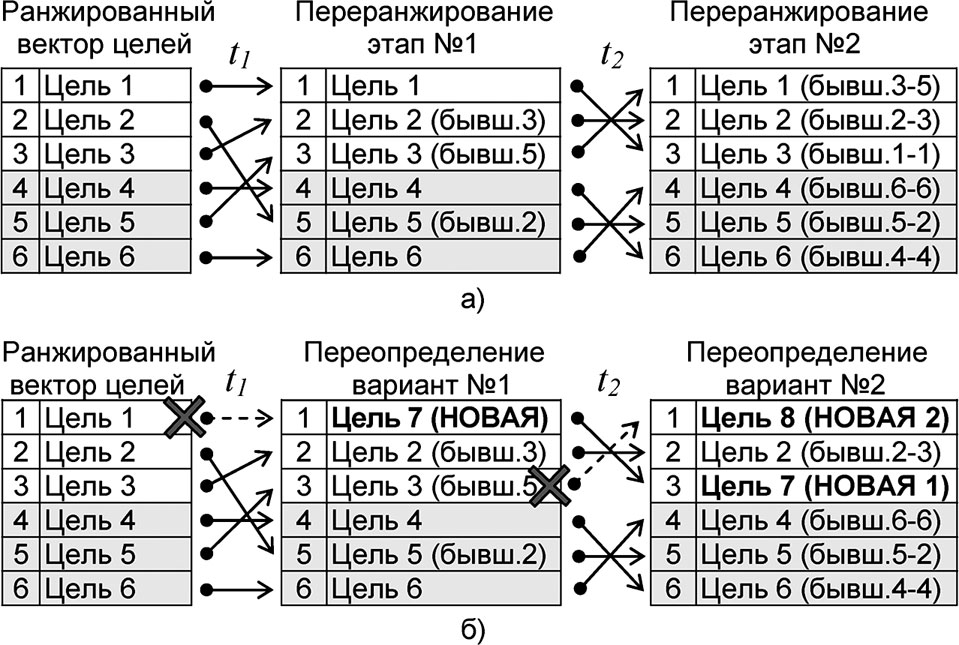
Рис. 6.5. Ранжирование элементов вектора целей в режиме слабого и сильного манёвров
В случае невозможности подбора удовлетворяющего систему варианта траектории движения в режиме «слабого манёвра», система может перейти в режим «сильного манёвра» (рис. 6.5б). При этом осуществляется отказ от некоторых целей и задач с заменой их на другие (например, отказ от цели № 1 с заменой её на новую цель № 7 и/или полный отказ от цели № 3 с внесением на первый уровень новой цели № 8). Естественно, что работа в режиме сильного манёвра, подразумевающая переопределение целевой функции и/или вытекающих их них задач и подзадач ещё больше расширяет матрицу возможных состояний универсума, описывающего систему.
Рассмотренный процесс позволяют согласиться с теми философскими воззрениями, которые утверждают, что достижения в адаптивного характера в материальной сфере большей частью «преходящи», неустойчивы – они легко могут быть потеряны, если надёжно не сбалансированы с информационным сопровождением рассматриваемого процесса. И наоборот, решение информационных задач обеспечивает не только достижения материальных целей, но и определённую степень устойчивости управления любыми процессами. Именно поэтому анахронизмы «горячих войн» в современной цивилизации неуклонно сменяются на «войны холодные», затем переходящие в ещё более жестокие, но уже «информационные войны».
Можно также заметить, что в случае, если вектор целей какого-то объекта управления в своей информационной части содержит элементы чуждой ему концепции, то достижение целей материального порядка для этого объекта чаще всего остаётся перманентно недостижимой задачей.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Функции управления Матрица функций управления
Функции управления Матрица функций управления Классические функции менеджмента мы оформили вот в такую матрицу-схему (табл. 1).По нашему мнению, она наглядно демонстрирует все основные направления деятельности руководителя фирмы.Согласно теории менеджмента в
4. Элементы процесса управления. Функции управления
4. Элементы процесса управления. Функции управления Управление – это единый процесс, который представлен разными управленческими работниками или органами. Целью их взаимодействия является выработка единого управляющего воздействия на объект управления. К
4. Этапы управления ЧР
4. Этапы управления ЧР Отметим этапы управления ЧР.1. Планирование ЧР – разработка плана удовлетворения будущих потребностей в человеческих ресурсах.2. Набор персонала – создание резерва потенциальных кандидатов по всем должностям.3. Отбор – оценка кандидатов на
Резервы управления
Резервы управления Эти резервные фонды необходимы для покрытия крупных непредвиденных и потенциальных рисков и поэтому применяются к проекту в целом.Резервы управления организуют после того, как организованы сметные резервы и выделены фонды.Они не зависят от сметных
3. Элементы процесса управления. Функции управления
3. Элементы процесса управления. Функции управления Управление – это единый процесс, который представлен разными управленческими работниками или органами. Целью их взаимодействия является выработка единого управляющего воздействия на объект управления. К
8. Американская, европейская и японская модели управления. «Новая философия управления»
8. Американская, европейская и японская модели управления. «Новая философия управления» Все рассмотренные концепции в большей или меньшей степени реализуются в конкретных моделях управления. Основными из них после 1970-х гг. являются американская и японская модели. В
31. Развитие концепции мотивации разными школами управления. Основные принципы управления
31. Развитие концепции мотивации разными школами управления. Основные принципы управления Разработка современной концепции мотивации началась с открытий школы человеческих отношений, хотя модели мотивации они не создали, но их вывод о важности социального
52. Цели и функции управления. Стратегическая и оперативная роли управления
52. Цели и функции управления. Стратегическая и оперативная роли управления Управление человеческими ресурсами – это проектирование формальных систем организации, которые обеспечивают эффективное использование человеческих знаний, навыков и талантов для достижения
1.2. Место и роль управления персоналом в системе управления организацией
1.2. Место и роль управления персоналом в системе управления организацией Труд – процесс сознательной целесообразной деятельности человека, воздействия его на предметы труда с целью создания материальных и духовных благ для удовлетворения личных и общественных
1.3. Персонал как объект управления, понятие и особенности управления персоналом, методы управления
1.3. Персонал как объект управления, понятие и особенности управления персоналом, методы управления Управлять поведением и настроением человека можно, формируя среду и / или непосредственно влияя на личность, «играя на струнах человеческой души». Влияя на поведение, очень
3.7. Финансовое обеспечение управления персоналом: бюджетирование деятельности службы управления персоналом
3.7. Финансовое обеспечение управления персоналом: бюджетирование деятельности службы управления персоналом Бюджетирование – это способ управления финансами организации, заключающийся в построении и исполнении бюджета организации на основе бюджетов отдельных
Методы управления
Методы управления Методы управления – способы воздействия управляющего субъекта на управляемый объект, руководителя на возглавляемый им коллектив.Следует различать методы управления и методы процесса управления. Методы управления характеризуют законченный акт
12. Цели системы управления персоналом, этапы организационного проектирования системы управления персоналом
12. Цели системы управления персоналом, этапы организационного проектирования системы управления персоналом Субъектами управления персоналом выступают лица и подразделения аппарата управления организации, осуществляющие функции управления работниками. Ими являются
3. Вражда управления
3. Вражда управления Когда перед компанией ставится задача и идет ее согласование, то часто разгораются жаркие дискуссии о том, а надо ли нам ЭТО?! Разные бизнес-школы по-своему описывают происходящее. Наиболее действенные причины противостояния внутри бизнеса