6.2. Режимы управления
6.2. Режимы управления
Управление любыми процессами является отработкой, реакцией системы на возникающие во внешней среде не/благоприятные воздействия, случайные внешние и внутренние ошибки («сбои», «отклонения»), а также на скрупулёзно учитываемые благоприятные стимулы, факторы и ситуации («подарки судьбы»).
Для любого протекающего процесса это означает, что в зависимости от воздействия на систему параметры процесса будут в ту или иную сторону отклоняться от идеального режима, описывая определённые траектории, вполне поддающиеся универсумной классификации.
В соответствии с алгоритмикой обработки информации в векторах управления общая траекторика работы всех стратификационных уровней класса 4U представляет следующий порядок вложенности (рис. 6.6):
– траектория балансово-программного режима, предусматривающего жёстко ограниченный набор входных состояний при неизменности вектора целей;
– траектория балансово-адаптивного (адаптационного) режима, предусматривающего возможность «гибкого» изменения числовых значений вектора состояния при неизменности вектора целей;
– траектория «слабого манёвра», являющаяся изменением ранжирования элементов в векторах управления;
– траектория «сильного манёвра», представляющая переопределение целевых функций векторов управления;
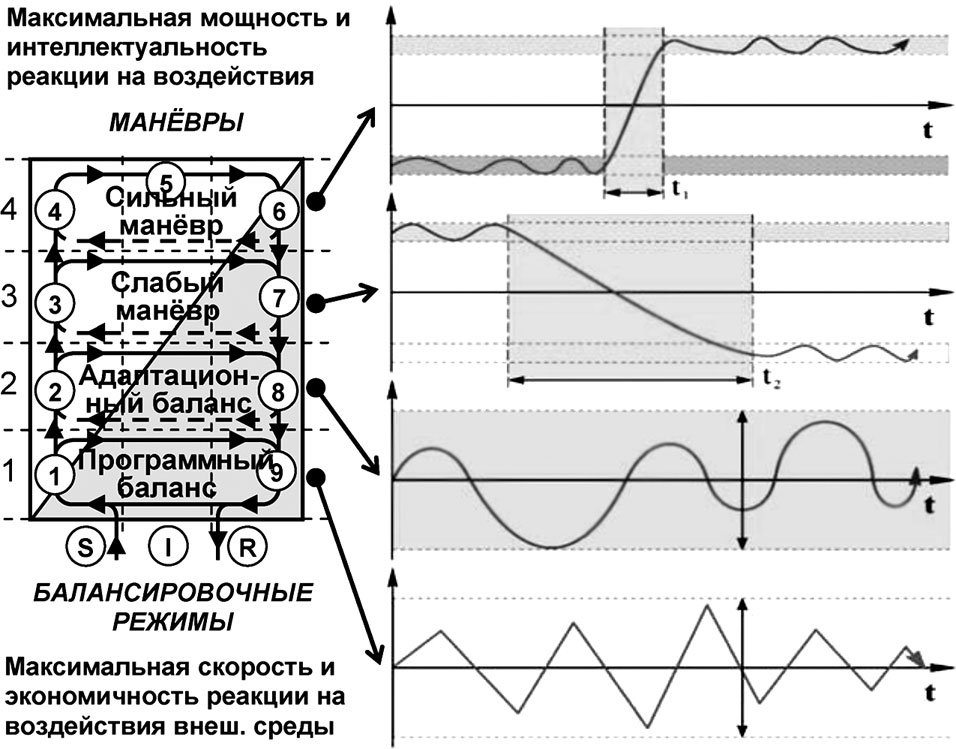
Рис. 6.6. Соответствие U-стратификации траекториям режимов управления
Можно рассмотреть работу этих режимов на совокупной сравнительной схеме (рис. 6.7).
Программный режим (?t1, рис. 6.7) имеет возможности подстройки системы в самом узком диапазоне (d1) внешних воздействий, адаптивный режим расширяет способности системы (диапазон d2) без изменения иерархического порядка элементов векторов управления (отклонения входят в диапазон «Ранжирование векторов № 2») и без смены целевой функции (нижняя половина рисунка «Целевая функция № 1»).
Работа системы в режиме слабого манёвра (?t3, точки траектории от А до В) предусматривает изменение порядка расположения элементов векторов управления («Ранжирование векторов № 2» меняется на «Ранжирование векторов № 1»), но также производится без смены целевой функции («Целевая функция № 1»). При этом диапазон отрабатываемых системой внешних воздействий (d3) за счёт включения в алгоритмику работы более одного диапазона ранжирования резко расширяется. В этом новом состоянии система может переключиться в новый адаптационный балансовый режим (диапазон d4, точки от В до С).
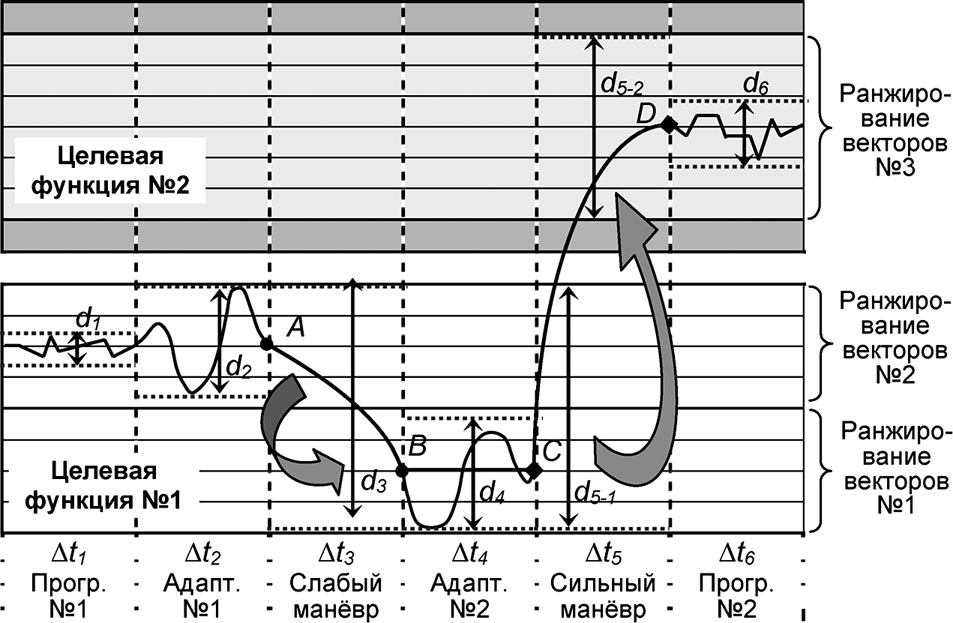
Рис. 6.7. Связь векторов управления с траекториями процесса управления
Переход системы в режим сильного манёвра (d5–1 и d5–2, точки С и D) означает ещё большее расширение диапазона работы и изменение целевой функции управления («Целевая функция № 1» заменяется областью «Целевая функция № 2»), после которого можно «уже в новой системе координат» перейти в другие режимы работы, например, в режим слабого манёвра, в адаптивный и затем в программный (?t6), тем самым сузив и оптимизировав диапазон отработки внешних воздействий (d6).
Таким образом, во-первых, целевая функция или концепция управления – это алгоритмика обнуления элементов векторов ошибки управления и, во-вторых, ранжирование векторов управления по универсумному принципу позволяет определить ответ на вопрос, можно ли считать процесс управления успешным, если часть параметров, заложенных в векторы, ухудшилась, а часть улучшилась.
Ответ прост: качество управления улучшилось, если улучшились параметры более приоритетных (информационных) элементов векторов и качество управления ухудшилось, если значения этих параметров ухудшилось. Ещё раз отметим: улучшение/ухудшение параметров векторов, имеющих более высокий приоритет рано или поздно, но неизбежно приводит к соответствующему изменению значений в менее приоритетных элементах векторов.
Следует подчеркнуть, что в соответствии с U-законом неразрывности переход системы с одного в другой режим может осуществляться только последовательно, страта за стратой, поэтому при переводе системы из адаптационного режима в точке С в режим сильного манёвра по умолчанию подразумевается вначале перевод системы в режим слабого манёвра, и только затем в область сильного манёвра. Аналогично и в точке D после осуществления сильного манёвра система по умолчанию должна перейти в режим слабого маневра, затем в адаптационный режим, и лишь после этого она может работать в программном режиме.
Диапазон колебаний траектории программного режима работы определяется главным образом «материальными» ограничениями конструкции системы. Диапазон колебаний траектории адаптивного режима работы определяется главным образом «материальными» ограничениями настраиваемых элементов системы. Диапазон колебаний траектории «слабого манёвра» определяется глубиной и сложностью предикционного расчёта. Диапазон колебаний траектории «сильного манёвра» определяется интеллектуальным уровнем, определяющим возможности суперсистемы к прогностике.
Привязка режимов управления к типологизации систем управления показывает их однозначное соответствие (рис. 6.8). Программный и адаптивный тип СУ – это балансировочные режимы работы, прогностический (предикционный) и интеллектуальный – это манёвры супер/систем.

Рис. 6.8. Соответствие типа СУ режимам управления классов 4U и 2U
Конечно же, данная стратификация не является догмой: универсумный подход позволяет детализировать это описание, разбив его на пять, шесть, восемь, сто двадцать восемь и любое другое количество уровней в зависимости от требований к точности описания систем различной сложности. Универсумный подход позволяет более точно представить и однозначно связать между собой описание различных схем, режимов, систем, областей состояний и критериев качества процесса управления.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКДанный текст является ознакомительным фрагментом.
Читайте также
Функции управления Матрица функций управления
Функции управления Матрица функций управления Классические функции менеджмента мы оформили вот в такую матрицу-схему (табл. 1).По нашему мнению, она наглядно демонстрирует все основные направления деятельности руководителя фирмы.Согласно теории менеджмента в
О методах управления
О методах управления Планирование – упорядочение процессов во времени, идеальная абстрактная организация, а точнее определение рациональных связей между объектами, процессами и их средой.[35] Место планирования в системе управления один из самых неоднозначно решаемых
Глава 6. Режимы и качество управления
Глава 6. Режимы и качество управления …К сожалению, человек свои материальные проблемы часто пытался и пытается решить не в соответствии с существующими помимо нас природными законами и закономерностями, а по своему усмотрению. В том числе субъективными средствами при
4. Элементы процесса управления. Функции управления
4. Элементы процесса управления. Функции управления Управление – это единый процесс, который представлен разными управленческими работниками или органами. Целью их взаимодействия является выработка единого управляющего воздействия на объект управления. К
3. Элементы процесса управления. Функции управления
3. Элементы процесса управления. Функции управления Управление – это единый процесс, который представлен разными управленческими работниками или органами. Целью их взаимодействия является выработка единого управляющего воздействия на объект управления. К
8. Американская, европейская и японская модели управления. «Новая философия управления»
8. Американская, европейская и японская модели управления. «Новая философия управления» Все рассмотренные концепции в большей или меньшей степени реализуются в конкретных моделях управления. Основными из них после 1970-х гг. являются американская и японская модели. В
31. Развитие концепции мотивации разными школами управления. Основные принципы управления
31. Развитие концепции мотивации разными школами управления. Основные принципы управления Разработка современной концепции мотивации началась с открытий школы человеческих отношений, хотя модели мотивации они не создали, но их вывод о важности социального
52. Цели и функции управления. Стратегическая и оперативная роли управления
52. Цели и функции управления. Стратегическая и оперативная роли управления Управление человеческими ресурсами – это проектирование формальных систем организации, которые обеспечивают эффективное использование человеческих знаний, навыков и талантов для достижения
1.2. Место и роль управления персоналом в системе управления организацией
1.2. Место и роль управления персоналом в системе управления организацией Труд – процесс сознательной целесообразной деятельности человека, воздействия его на предметы труда с целью создания материальных и духовных благ для удовлетворения личных и общественных
1.3. Персонал как объект управления, понятие и особенности управления персоналом, методы управления
1.3. Персонал как объект управления, понятие и особенности управления персоналом, методы управления Управлять поведением и настроением человека можно, формируя среду и / или непосредственно влияя на личность, «играя на струнах человеческой души». Влияя на поведение, очень
3.7. Финансовое обеспечение управления персоналом: бюджетирование деятельности службы управления персоналом
3.7. Финансовое обеспечение управления персоналом: бюджетирование деятельности службы управления персоналом Бюджетирование – это способ управления финансами организации, заключающийся в построении и исполнении бюджета организации на основе бюджетов отдельных
Принципы управления
Принципы управления Соблюдение принципов управления можно рассматривать как залог успеха управления.Принцип (от лат. principium – начало, основа) – 1) основное исходное положение какого-либо учения, теории, науки, мировоззрения, политической организации и т. д.; 2) внутреннее
12. Цели системы управления персоналом, этапы организационного проектирования системы управления персоналом
12. Цели системы управления персоналом, этапы организационного проектирования системы управления персоналом Субъектами управления персоналом выступают лица и подразделения аппарата управления организации, осуществляющие функции управления работниками. Ими являются